안녕하세요, 메이드인네버랜드입니다. [CATIA를 이용한 굴삭기 만들기]라는 책으로 굴삭기를 만드는 과정을 포스팅한지도 한달이 좀 넘었습니다. 그동안 올린 포스트도 7개가 되는군요. 삽질도 참 많이 했는데요..(ㅡ_ㅠ)
이제까지 만든 각 부분들을 Assembly해서 드디어 하나의 굴삭기를 완성했습니다!! 그 과정을 보여드리려고 합니다.

먼저 조종실과 프레임, Bucket과 Arm, Boom을 연결하는 작업이 선행됩니다.

Bucket과 Arm은 위와 같이 여러 부품들로 함께 연결되게 됩니다.

그 다음 각 부분들을 움직일 때 사용되는 유압 실린더가 연결되게 됩니다.

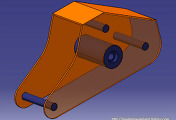
그리고 이 유압 실린더들과 각 부분들은 위의 그림에서 파란색으로 표시된 핀(Pin)으로 고정되게 되구요.

Bucket과 Arm을 연결하는 부품들과 실린더가 핀(파란색)으로 연결된 모습입니다.

이 과정을 거치면 위와 같이 하부 주행체에 올려지는 윗 부분이 조립되게 됩니다.
그 다음엔 캐터필러를 조립해야 하는데요.
책을 가지고 계신 분들은 아시겠지만.. 책에서는 캐터필러의 본을 딴 뒤에 2mm offset 한 뒤 Track을 조립하라고 되어있습니다만.. 자세히 보시면 책의 offset 명령에는 1mm로 offset이 설정되어 있습니다. 뭘 믿을까 하다가.. '에이 그래도 캡쳐되어있는게 더 정확하겠지' 라는 생각으로 1mm offset 후 위 그림처럼 10mm 간격으로 Track 간격을 조정했는데..(이 간격 조정은 일일이 점을 손으로 하나하나 찍은 뒤 10mm로 일일이 구속을 지정해주어야 합니다. 쌩노가다..ㅠ)

!!!
처음과 끝 점 간격이 위의 화살표가 표시하는 것처럼 10mm에 훨씬 못미칩니다. 이렇게 되면 Track 부품을 조립을 해도.. 마지막 부분에 가서 부품이 겹쳐서 이상하게 되겠지요ㅠ
결국.. 1mm offset으로 다시 설정한 뒤 Track 간격을 조정했습니다. 몸에서 사리 생기겠어요. 아 이미 생겼을라나.

수정한 뒤 시작점과 맨 끝점의 거리를 측정하니 10.077mm가 나오는군요. 0.077mm 정도는 무시하고 조립할 수 있는 정도이니 조립이 가능하겠어요.
이제.. Track을 조립해봅니다.

음?

음???

저거 일일이 하나하나 손으로 전부 지정해서 조립해야하는 겁니다.
삽질&노가다에요ㅠ_ㅠ 왼손으로 턱괴고 오른손으로 클릭클릭하며 멍하니 작업했네요.

짠! 캐터필러 완성입니다. x표시로 되어있는 부분은 Track들이 조립되기 위한 표시점들입니다.

캐터필러 아래쪽입니다. Track 조립하는데 고생은 했지만.. 그래도 만들어놓고 보니 이쁘네요.

이제 하부주행체와 캐터필러를 조립해봅니다. 캐터필러 하나를 하부주행체에 조립한 뒤..

짠!

3개를 더 복사해서 각 위치에 맞게 구속시켜줍니다.
이제 거의 다 됐습니다. 위에서 만들어진 굴삭기의 윗부분과 하부주행체 & 캐터필러 조합을 조립하고 색을 좀 이쁘게 꾸며주면..

짠! 카티아로 만든, 완성된 굴삭기 모습입니다.

다른 각도에서의 모습입니다.

Bucket과 Arm의 연결부분입니다. 연결부품들의 색을 다르게 설정하니 뭔가 좀 더 있어보이는군요. 후훗.

민망한 부분쪽(?!)으로 본 굴삭기의 뒷모습입니다.

각도를 다르게 해서 본 굴삭기의 뒷모습입니다.
사실 모양상으로는 완성된 굴삭기이지만.. 자세히 들여다보면 미숙한 점이 어마무시합니다.

가장 삽질했었던게 바로 위의 실린더부분.. 이 실린더 내부에도 구속이 걸려있고 이 실린더와 프레임, 실린더와 Boom 각각에도 구속이 걸려있습니다. 하지만 Boom과 프레임과의 각도를 조절해서 위의 완성 그림처럼 Boom이 약간 들려있게 각도 구속을 추가하면 계속 에러가 나더라구요.
일단 현실타협으로 실린더 내부에 offset 구속을 주고 위치변경만 시켜서 일단 모양은 완성시켰습니다. 구조적으로나 구속을 거는데 있어서 완전히 에러없이 완성시키기엔.. 제 멘탈이 너무 약하더군요ㅠ
일단 모양은 완성시켰습니다만, 책에서는 모양 완성 후에도 여러가지 도면 만드는 법, 구조 해석과 DMU kinematics를 이용한 기구학 움직임 등의 여러 추가적인 내용이 더 수록되어 있습니다. 계속 업데이트할 생각입니다.
마지막으로 저를 멘붕시켰던 저자분의 한마디를 소개하며..

뭐.. 이런 느낌?

이제까지 메이드인네버랜드였습니다!
앞으로도 굴삭기 제작기는 계속 업데이트 됩니다.
지난번 제작기를 보고싶으시다면!!!
☞ [CATIA를 이용한 굴삭기 만들기 : Bucket]
☞ [CATIA를 이용한 굴삭기 만들기 : Cylinder]
☞ [CATIA를 이용한 굴삭기 만들기 : 조종실과 프레임]
☞ [CATIA를 이용한 굴삭기 만들기 : 하부 주행체]
☞ [CATIA를 이용한 굴삭기 만들기 : 캐터필러 & etc]

'카티아 관련 정보' 카테고리의 다른 글
| 카티아에서 Design mode란? (6) | 2014.04.27 |
|---|---|
| CATIA를 이용한 굴삭기 만들기 : 구조해석 (8) | 2014.02.23 |
| CATIA를 이용한 굴삭기 만들기 : 캐터필러 & etc (1) | 2014.02.01 |
| CATIA를 이용한 굴삭기 만들기 : 하부 주행체 (1) | 2014.01.31 |
| CATIA를 이용한 굴삭기 만들기 : 조종실과 프레임 (0) | 2014.01.30 |